4. 視差画像の比較
各種アルゴリズムを比較した論文
記事2でも紹介したコンピュータビジョンのベンチマークで有名な The Middlebury Computer Vision Pages の MRF Minimization のページには「A Comparative Study of Energy Minimization Methods for Markov Random Fields with Smoothness-Based Priors, IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 30(6):1068-1080, June 2008」 という論文が紹介されています. この論文はサイトラベリング問題のエネルギー最小化アルゴリズムを詳細に比較しているもので, どのようなエネルギー関数を使ったかや,ラベルの数などが正確に記述されています.
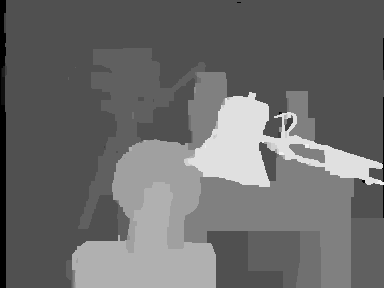
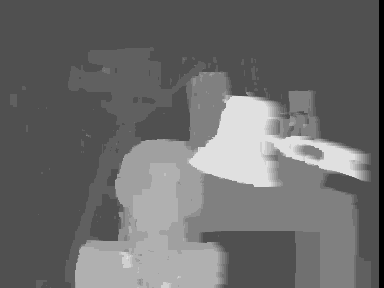
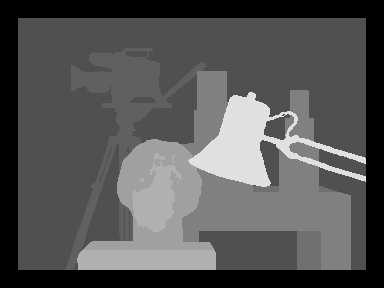
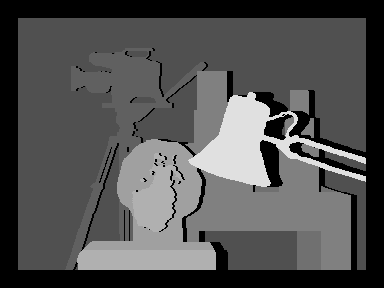
そして ResultのTsukuba stereo のページにはTsukubaステレオ画像に対するアルゴリズムの実行結果である 視差画像が各アルゴリズム毎に紹介されています. このTsukubaステレオ画像のエネルギー最小化に使われたエネルギー関数は アルゴリズムに関係なく以下のようになっているそうです. まずdata項はRGB毎の差の絶対値の和,これは記事3と全く同じです. 次にsmooth項はtruncated linearで差が2で打ち切り, そして係数は左画像の画素値変化が8未満であれば40,そうでなければ20というものです. これは記事3に比べてずいぶん複雑です. 視差という厄介なラベルをできるだけうまく扱おうとしていると思われます. ラベル数は16となっています. 記事3のpixel-disparity modelでは視差-10から視差-28の19ラベルを, gaze_line-depth modelではdepthは視差の半分ですからdepth-5からdepth-14の10ラベルを使っています. 一方,比較したアルゴリズムと結果の視差ファイルは
| abbreviation | description | disparity_file |
|---|---|---|
| ICM | Iterated Conditional Modes | tsu-ICM.png |
| Swap | graph cut, Swap move | tsu-Swap.png |
| Exp | graph cut, Expansion move | tsu-Expansion.png |
| BP-S | Belief Propagation, S version | tsu-BP-S.png |
| BP-M | Belief Propagation, M version | tsu-BP-M.png |
| TRW-S | Tree ReWeighted message passing, S version | tsu-TRW-S.png |
| GT | Ground Truth | tsukuba-truedispL.png |


単純に視差を比べるプログラム
2つの視差ファイルの視差を単純に比較するプログラム compare_disparity.cpp を作りました. ピクセル毎に2つの視差ファイルの視差を比較して, その差を合計するプログラムです. ただし基準となる視差ファイルの視差が0の場合は, そのピクセルの視差の差を無視するようにしました. makefile もダウンロードして
make do./compare true-disparity_file disparity_file比較結果
記事2で作った修正真値視差画像true.pngとの比較結果は
| abbreviation | description | disparity_file | difference |
|---|---|---|---|
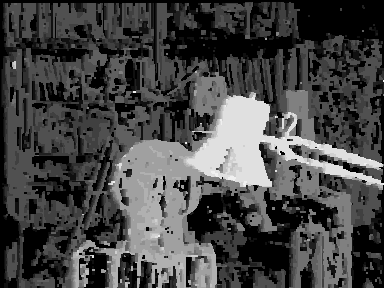
| ICM | Iterated Conditional Modes | tsu-ICM.png | 3118976 |
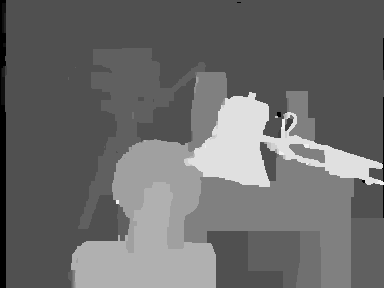
| BP-S | Belief Propagation, S version | tsu-BP-S.png | 691440 |
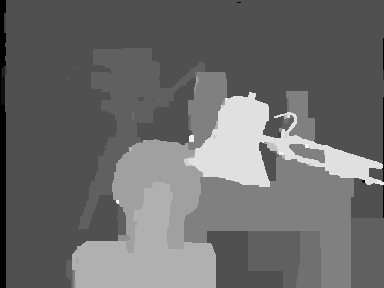
| BP-M | Belief Propagation, M version | tsu-BP-M.png | 430864 |
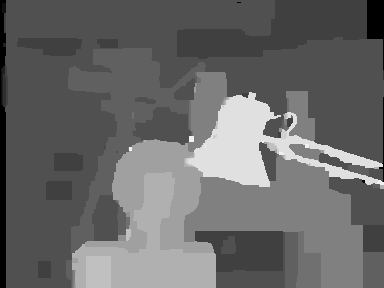
| Expansion | graph cut, Expansion move | tsu-Expansion.png | 338960 |
| Swap | graph cut, Swap move | tsu-Swap.png | 334416 |
| TRW-S | Tree ReWeighted message passing, S version | tsu-TRW-S.png | 329920 |
| DIS | pixel-DISparity model | disparity14.png | 249344 |
| DEP | gaze_line-DEPth model | pen_14_inh_1023.png | 216336 |
| GT | Ground Truth | tsukuba-truedispL.png | 0 |
