11. Stereo Rectifier using Gaze_line-Depth Model
Z. Zhang's camera calibration method
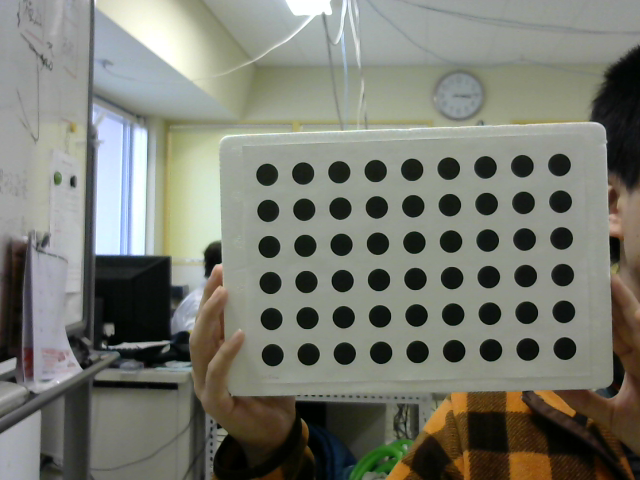
The well-known Z. Zhang technique ("A flexible new technique for camera calibration", IEEE Transactions on Pattern Analysis and Machine Intelligence, 22 (11): 1330-1334, 2000) uses an instrument such as
When you try it, it is difficult to obtain satisfactory results, and if you use two cheap USB cameras (Logitech C270 etc.) introduced in article 5, you can not get the stereo parallel accuracy that can be used for stereo vision did. I feel that the cause is that it is a rolling shutter and there is no simultaneousness because there are two USB connections in the first place. I think that the algorithm is weak for mathematically contradictory data. Researchers in the survey field have told me that it is linguistic, such as calibrating the camera with the calibration board in hand. However, it is not easy to fix to something because you have to shoot at various angles.
New camera calibration method
When I was thinking that there was no more robust method, I thought that the graph cut value of stereo vision by Gaze_line-Depth Model could be used for stereo rectification as it was, and I was a 4th year student at Oguri Lab. We set the theme for Toshizen Miyazaki's graduation research and proceeded together.
At that time, Miyazaki-kun's photograph was approved and used on this page.
First of all, look at the execution example to see what this method is called 3D Reconstruction Method.




In the following execution example, the left and right sides are greatly shifted, but they are parallelized properly.




The following execution example changes the distance continuously from near to far and there is almost no face-to-face, but this also works well.




Principle of 3D reconstruction method
What I found in article 10 is that stereo parallelization can be achieved if the left and right camera images are properly rotated in three dimensions. Z.Zhang's method uses a priori calculation to calculate this rotation that can be stereo-parallelized. And since the calculation and order seem to be weak to data containing contradictions, let's consider a method that is as deductive as possible. In the first place, the fact that 3D is restored by minimizing the evaluation value of energy by graph cut means that the smaller the energy is, the more likely it is as 3D. It is thought that it can be judged by this energy. Therefore, repeat the process of adopting an arbitrary rotation to reduce the energy value for the three degrees of freedom of rotation with the left camera and three with the right camera, and stop when the energy no longer decreases I tried the basic method of doing this and it worked. There was no need to escape from the minimum.
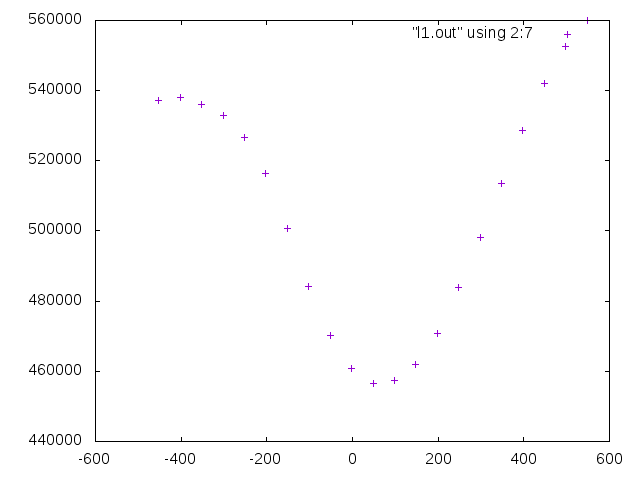
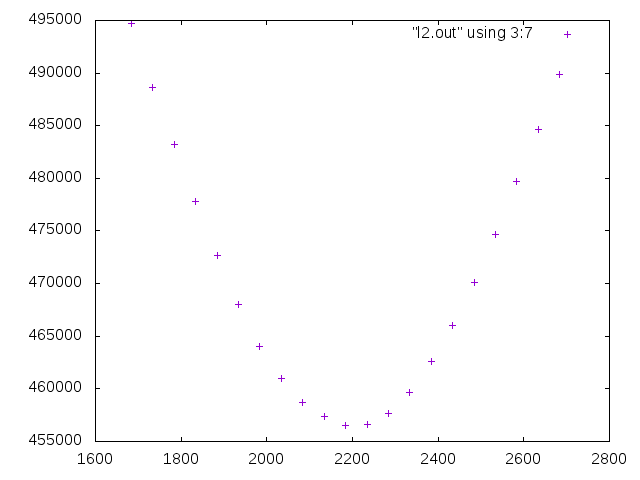
Examining how the energy changes around the convergence value of the rotation where it is no longer possible to reduce the energy compared to Example 1 above, it is
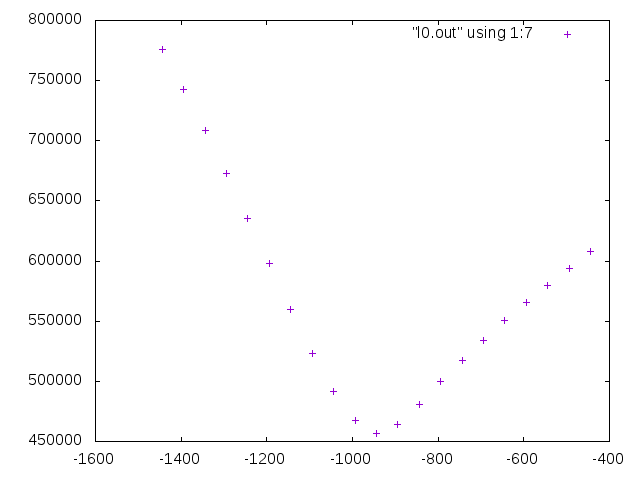
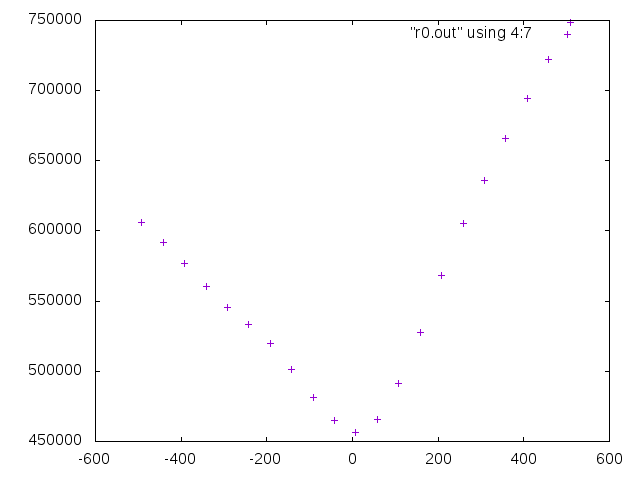
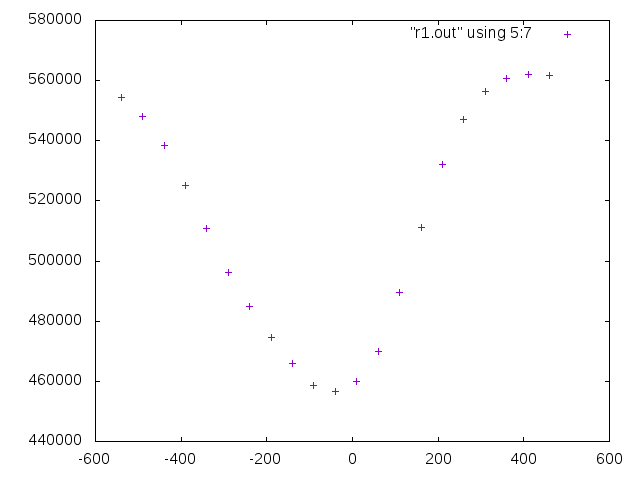
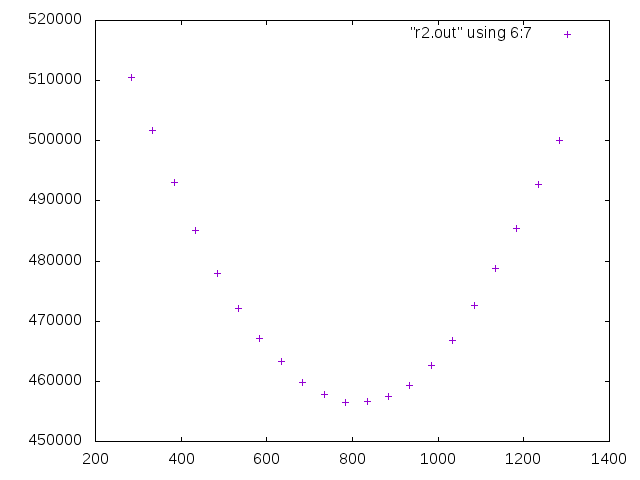
3D rotation of camera image
The 3D rotation of the camera image itself is performed using the OpenCV initUndistortRectifyMap function described in article 10, but before and after that, it looks like
void rotate(int l0, int l1, int l2, int r0, int r1, int r2) {
cv::Mat M = cv::Mat::zeros(3, 3, CV_64F);
M.at(0, 0) = focal/pixel;
M.at(0, 2) = double(XX-1)/2;
M.at(1, 1) = focal/pixel;
M.at(1, 2) = double(YY-1)/2;
M.at(2, 2) = 1.0;
cv::Mat D = cv::Mat::zeros(1, 5, CV_64F);
cv::Size S = cv::Size(XX, YY);
cv::Mat lV = cv::Mat::zeros(1, 3, CV_64F);
cv::Mat rV = cv::Mat::zeros(1, 3, CV_64F);
lV.at(0, 0) = 0.00001*l0;
lV.at(0, 1) = 0.00001*l1;
lV.at(0, 2) = 0.00001*l2;
rV.at(0, 0) = 0.00001*r0;
rV.at(0, 1) = 0.00001*r1;
rV.at(0, 2) = 0.00001*r2;
cv::Mat lR;
cv::Mat rR;
Rodrigues(lV, lR);
Rodrigues(rV, rR);
cv::Mat lmap1;
cv::Mat lmap2;
cv::Mat rmap1;
cv::Mat rmap2;
initUndistortRectifyMap(M, D, lR, M, S, CV_16SC2, lmap1, lmap2);
initUndistortRectifyMap(M, D, rR, M, S, CV_16SC2, rmap1, rmap2);
remap(lframe, llframe, lmap1, lmap2, cv::INTER_LINEAR);
remap(rframe, rrframe, rmap1, rmap2, cv::INTER_LINEAR);
} Main body of 3D reconstruction method
The body of the 3D reconstruction method is
void calib(void) {
int l0 = 0; int l1 = 0; int l2 = 0;
int r0 = 0; int r1 = 0; int r2 = 0;
rotate(l0, l1, l2, r0, r1, r2);
int min = graph_cut();
for (int mul = 512; mul >= 8; mul /= 2) {
int flg = 0;
int step = 0;
for ( ; ; ) {
if (step == 0) l0+=mul; else if (step == 1) r0-=mul;
else if (step == 2) l0-=mul; else if (step == 3) r0+=mul;
else if (step == 4) l2+=mul; else if (step == 5) r2-=mul;
else if (step == 6) l2-=mul; else if (step == 7) r2+=mul;
else if (step == 8) l1+=mul; else if (step == 9) r1-=mul;
else if (step == 10) l1-=mul; else if (step == 11) r1+=mul;
else {}
rotate(l0, l1, l2, r0, r1, r2);
int now = graph_cut();
if (now >= min) {
if (step == 0) l0-=mul; else if (step == 1) r0+=mul;
else if (step == 2) l0+=mul; else if (step == 3) r0-=mul;
else if (step == 4) l2-=mul; else if (step == 5) r2+=mul;
else if (step == 6) l2+=mul; else if (step == 7) r2-=mul;
else if (step == 8) l1-=mul; else if (step == 9) r1+=mul;
else if (step == 10) l1+=mul; else if (step == 11) r1-=mul;
else {}
}
else {
flg = 1;
min = now;
}
step++;
if (step == 12) {
if (flg == 0) break;
flg = 0;
step = 0;
}
}
}
rotate(l0, l1, l2, r0, r1, r2);
}Why the focal length can be determined by Z. Zhang's method
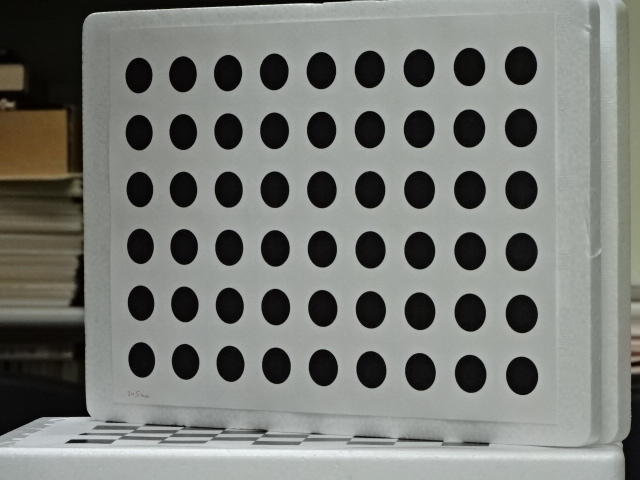
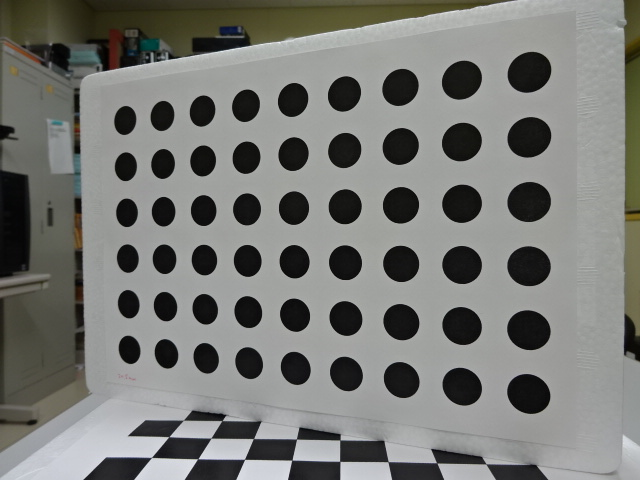
The next two pictures are the same calibration board taken with a camera with zoom function, that is, the focal length can be changed.
Both are taken with the same tilt, and both have the calibration board on the right side and the left side on the back.
In addition, the zoom was adjusted so that the right side on the near side was the same size in perspective.
You can think of this size as a measure of length in pixels.
The following lengths and distances are all relative to this standard.
If you look at the vertical and horizontal intervals of a circle (ellipse?), You can see the inclination of the board and the depth distance (A).
This is the same in the two cases.
On the other hand, you can see the ratio (B) of the distance from the camera as it gets smaller as you go deeper.
From the actual distance (A) and the distance ratio (B), the focal length in pixels is obtained.
Program distribution
graph_cut.cu Download rectify.cpp , makefile , 3_R.png , and 3_L.png .
make do| character | function |
|---|---|
| q | quit |
| ? | help |
| M | do calibration |
| m | left picture |
| , | stereo picture |
| . | right picture |
| < | both picture |
| s | depth(disparity) to front |
| t | depth(disparity) to back |
| h | eye move left angle |
| j | eye move down angle |
| k | eye move up angle |
| l | eye move right angle |
| f | eye move near |
| n | eye move far |
| H | eye move left |
| J | eye move down |
| K | eye move up |
| L | eye move right |
| F | eye move forward |
| N | eye move back |
| C | clear angle and position |
./rec right_image left_image max_disparity min_disparity penalty inhibit divisor option