9. Entered KITTI's Stereo2012 benchmark with a method name of GLDS 96th place
KITTI's true parallax image format is different
Source codes of the Method GLDS (Gaze_Line-Depth model Stereo) are submit_kitti.cpp and graph_cut.cu .The makefile for GLDS is makefile .You should type "make do7" .KITTI's true parallax image is different from TSUKUBA image in the left image pixel scale factor 256 The parallax of was specified with 16 bits. Since I thought that parallax was defined in the right image, I was messed up. The TSUKUBA image and the KITTI image were the same as the reference image on the left.
- quote training/colored_0/000000_10.png again as L000000_10.png
- quote training/colored_1/000000_10.png again as R000000_10.png
- new quote training/disp_occ/000000_10.png as O000000_10.png
- new quote training/disp_noc/000000_10.png as N000000_10.png


make do2
./true disparity_to_correct result_disparity image_in_which_contradiction_is_red
Left parallax image generation with Gaze_line-Depth model
depth_kitti.cpp Is a program to generate a left parallax image by stereo vision processing by gaze_line-depth model. Corresponds to depth_stereo.cpp in article 3, but the parallax is added to the left image instead of the right image, the scale factor is fixed at 256, and the pixels are expressed in 16 bits instead of 8 bits. The depth image used in the next 3d_kitti.cpp is also generated at the same time as the left parallax image. graph_cut.cu If you also download
make do1./depth right_image left_image max_disparity min_disparity penalty inhibit
3D display program
3d_kitti.cpp Is a 3D display program using depth images and left parallax images. Corresponds to 3d_stereo.cpp in article 3, but does not perform stereo vision processing by itself. In article 3, both depth_stereo.cpp and 3d_stereo.cpp included gaze_line-depth model stereo vision processing. Since KITTI's true left parallax image contains parallax information that could not be defined, I wondered how correct the parallax value itself was and prepared this program for visual confirmation.
make do3./3d right_image left_image max_disparity min_disparity depth_image left_disparityProgram to compare parallax
cmp_kitti.cpp is the version of compare_disparity.cpp in article 4 in KITTI format.
make do4./cmp true_left_disparity left_disparity difference_image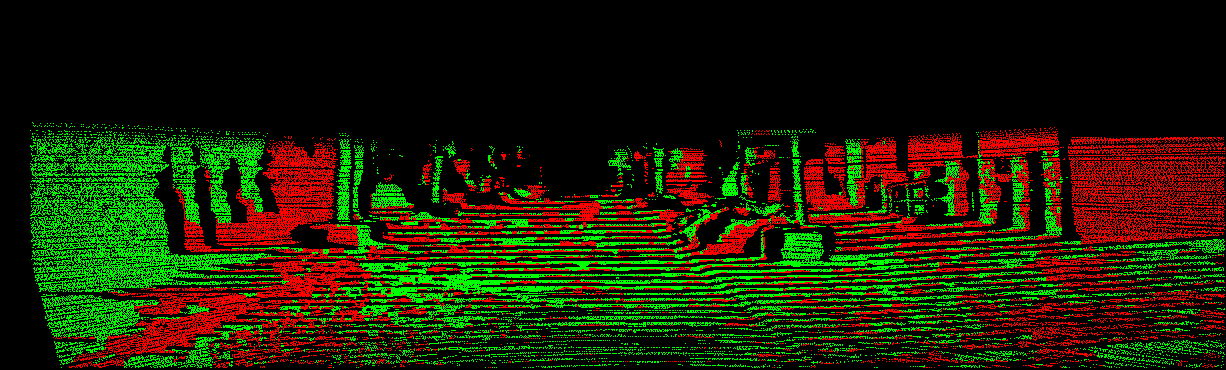
Program to check the range of parallax
chk_kitti.cpp Is a program to check the range of 194 true left parallax provided by KITTI's stereo2012 benchmark training.
make do5Confirmation of evaluation method
You can see how it is evaluated by reading evaluate_stereo.cpp included in the development kit that you can download from the KITTI stereo2012 page. It seems that the parallax is evaluated by the average value of the difference of parallax and the percentage of pixels with 3 or more different pixels. Not only 3 pixels but also 1 pixel or more, 2 pixels or more, 4 pixels or more, 5 pixels or more ratio and effective pixel ratio are also output. Parameters that can be changed in depth_kitti.cpp are the parallax range, penalty value, and inhibit value. The inhibit value can be anything as long as it is sufficiently large, so we set it to 4095. In 1023 used in the TSUKUBA image, the result of red_true_kitti.cpp would be red (with contradiction), so it was almost quadrupled. If gaze_line-depth model is used, inconsistency should not be detected in true_kitti.cpp originally, so it means that the branch that has been inhibited has been cut. On the other hand, since the penalty value and the parallax range can only be matched with each other, we looked for places where the result would be better with some values. I didn't check the whole range, but the parallax was 4 to 120 pixels. The penalty value is 24. With this parameter, the average parallax difference in the training data was 2.909685 px, and the percentage of pixels with different parallaxes by 3 pixels or more was 17.1%.
Data submission and result 96th
submit_kitti.cpp Is a 121-line stereo vision processing program that creates submission data. The stereo vision processing part is the same as depth_kitti.cpp.
make do7